What if we could build a robot dog that actually behaves like a dog? Not just walking and running, but understanding its environment, responding to commands, and maybe even developing personality?
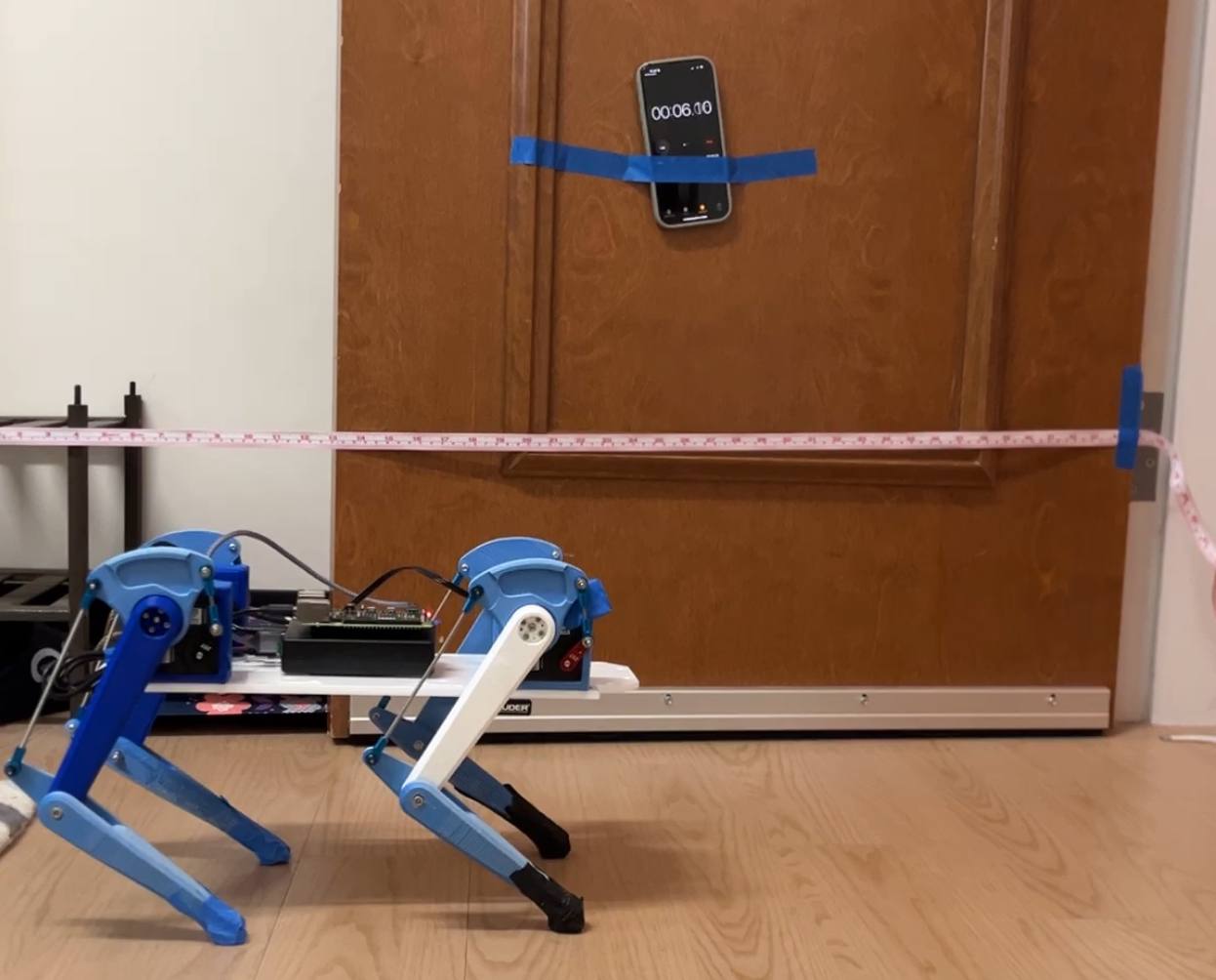
This exploration started with a simple question: How hard could it be to build a quadruped robot?
Turns out, pretty hard. But also incredibly rewarding.